文章图片
文章图片
文章图片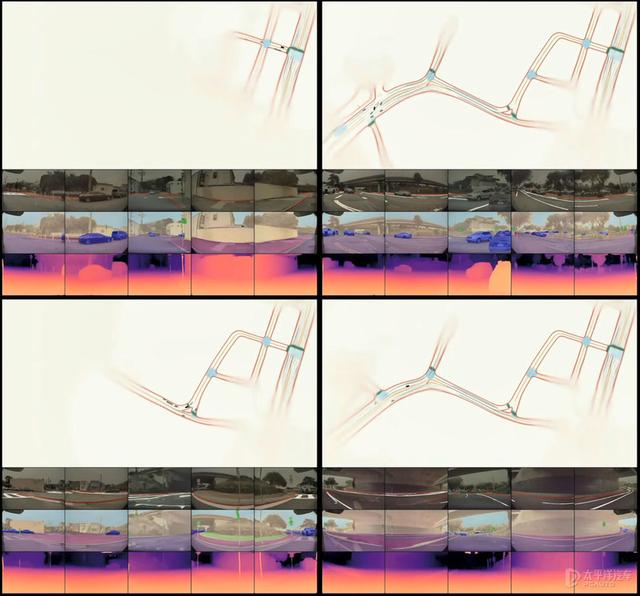
文章图片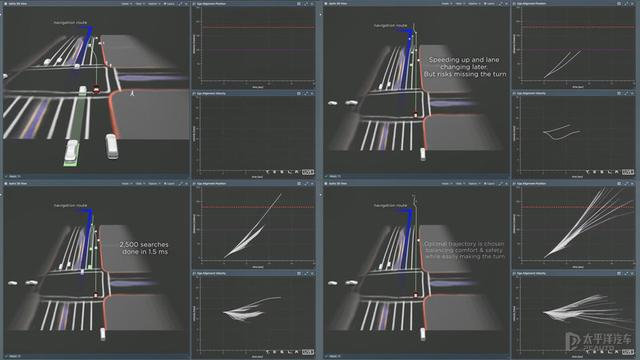
文章图片
文章图片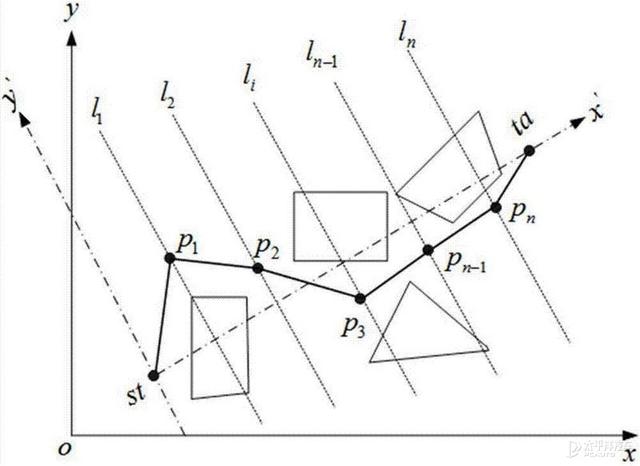
文章图片
文章图片
文章图片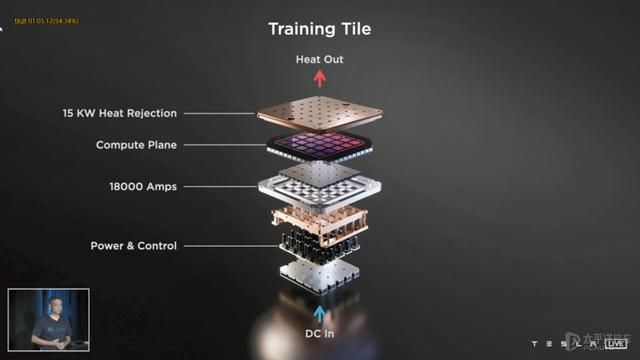
文章图片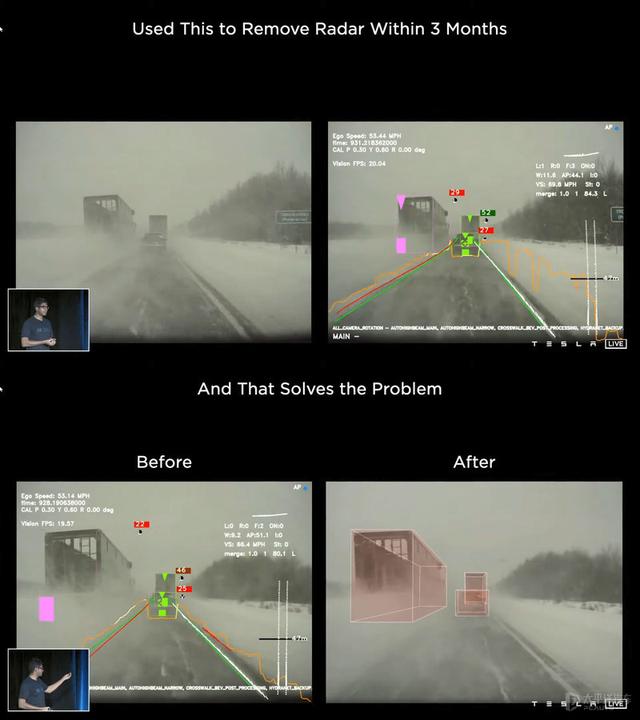
文章图片
文章图片
文章图片
【太平洋汽车网 行业频道】最近几天 , 国内发生了“驾驶蔚来ES8启用驾驶辅助功能(NOP领航状态)下发生车祸身亡”的事件 。 几乎同时 , 美国政府监管机构国家公路交通安全管理局(NHTSA)宣布 , 将对特斯拉Autopilot 自动辅助驾驶展开安全调查 , 涉及11起事故 , 76.5万辆车 。 中美两起事件几乎同时出现 , 将“高阶辅助驾驶”安全性推上了风口浪尖 。 在这样的舆情背景下 , 特斯拉在当地时间8月19日(北京时间8月20日)如期举办了自动驾驶相关的“AI DAY”活动 。
特斯拉在活动上并没有提及NHTSA的调查 , 不过很“调皮”的玩了个梗 。 在谈及特斯拉算法会标记前车的各种特征 , 并根据前车类似控制车距时 , 画面显示的是一排呼啸而过的警车 , 主持人补充说 , 他们可能在执行某种任务吧 。 而在NHTSA针对特斯拉调查的11起事故 , 7起是与警车相撞、2起与消防车相撞、1起撞的是巡逻车 。 按这个意思理解 , 大概是特斯拉以后看到警车会躲得远远的?
当然 , 这点细节不是重点 , 敢在风口浪尖上如期举办“AI DAY” , 当然还是因为他们发布的东西真的很牛X 。 发布会上最闪耀的当然是能在全球排第五的“Dojo”超级计算机(排在他前面的都是不同国家所有的超算) , 和其别具一格的芯片设计 。 而发布会上最有趣的是最后的彩蛋环节 , 一个人形机器人缓步走上了舞台 。
这个名叫Tesla Bot的机器人目标是“可以100%模拟人类的性能 , 在未来为人类社会释放更多的劳动力” 。 好家伙 , 如果不是现场那位突然开始疯狂跳舞 , 我还以为特斯拉真的已经把这玩意做出来了呢 。 现场跳舞这位当然还是真正的人类舞者 , 马斯克丢出这么一个疯狂的“PPT计划” , 无非是告诉全世界 , 特斯拉的超算算力可以强(xian)到可以让我们的工程师鼓捣人形机器人了 。 同时也向全世界人工智能领域的人才发出邀请 , 如果你们来特斯拉上班 , 不用困在枯燥的自动驾驶标记这些琐碎的小事上 , 这里有最好的设备让你有机会实现最疯狂的想法 。
没错 , 本次特斯拉“AI DAY”不像一年前顶着疫情邀请大批车主车迷到场的“电池日” , 而是面向全世界人工智能领域人才的一场凡尔赛发布会 , 目标当然是吸引人才的加入 , 这一点也得到了马斯克的确认 。
那这次“AI DAY”和消费者有啥关系吗?没有 , 但也并非全无关系 。 特斯拉首先解读了目前已经在北美地区推送的FSD工作原理 , 可以很好的解答FSD如何在不依赖高精度地图、激光雷达等 , 依赖纯视觉便可以实现城市环境下的自动辅助驾驶能力 。
从去年开始 , 特斯拉Autopilot/FSD已经升级采用视频流数据分析算法 , 通过对收集到的数据加入时间戳 , 特斯拉可以形成一定时间的“记忆”能力 , 并绘制出周边更大范围内的地图信息 。 例如刚刚走过的路或刚刚看到又被挡住的车等 , 都会保留在特斯拉绘制的地图上 , 并根据这些数据 , 对视觉范围之外的信息进行预测 。
特斯拉能够记得视野中的卡车挡住了一台车 , 也会对被挡住的车的行进路线进行预测避免碰撞 。 而对建筑等遮挡的视野之外的道路走向等 , 也会实时进行不间断的预测 , 这些预测会在越接近时变得越发准确 , 借此可以辅助车辆对后续的路径进行规划 。
有人可能会好奇 , 这样的地图绘制是否属于高精度地图?是否涉嫌违法测绘地图?
首先这不是高精度地图 , 地图测绘会涉及当地的经纬度等信息 , 而高精度地图包含的信息更加丰富 。 高精度地图需要提前完成测绘等数据搜集工作 , 并对数据进行加工生产 , 并下发至车辆 。 通过存储的高精度地图可以减少车辆对道路信息实时感知、预测的需求 , 将更多的算力释放到对路面目标的感知上 , 与通过摄像头进行的实时地图绘制并不相同 。
至于法规方面 , 不同国家和地区对地图测绘的规定也不尽相同 。 地图测绘除了道路信息 , 还会涉及到经纬度 , 甚至精确的大地坐标等可能关系到国家安全的敏感信息 。 在我国 , 地图测绘需要相关资质 , 且地图数据不得通过网络发送 。 有资质的图商需要将测绘的数据用硬盘等线下方式送至国家测绘局进行不可逆的加密处理 。 不过这些测绘并非通过摄像头可以完成 , 特斯拉对周遭地图的绘制 , 预计能够绕开绝大多数国家和地区对地图测绘的限制 。 因此该功能也能帮助特斯拉在无需高精度地图数据的情况下 , 在世界各地开启自动驾驶相关功能 。
不过 , 前不久我们发布了《关于加强智能网联汽车生产企业及产品准入管理的意见》 , 要求:未经审批 , 不得通过在线等软件升级方式新增或更新汽车自动驾驶功能 。 因此 , 特斯拉FSD想要在国内向用户推送 , 也需要经过相关部门的审批 , 这或许会影响FSD在国内的推送节奏 。
除了对道路等的预测 , FSD还会对目标物体的行进轨迹进行实时预测 。 在发布会上公开的视频资料中 , 我们可以清晰的看到包括人、车辆等不同类型、不同速度的目标前有一些长短不一的线 , 这些就是特斯拉对该目标接下来的运动轨迹的预测 , 这些线条也会根据目标状态的不断变化实时发生变化 。 这些对于人类而言无非是本能的反应 , 但人工智能能够做到这种程度的预测却已经是当下国际最先进的水平之一了 。
完成了对目标和道路的感知和预测 , 就需要对车辆接下来行进的路线进行规划 。 特斯拉在发布会上提到了三个典型场景 , 第一个是旁边车道有车情况下的变道 。 基于视频流数据分析可以对旁边车道车辆接下来的位置进行预测 , 而非基于当下两车的相对位置做出决策 , 经过前期对数据的反复推演和多种方案的对比 , 神经网络可以学习到最优的变道时机 , 并在后续的实际场景中灵活应用 。
第二个是两边停满车的拥挤窄到遇到对向来车的场景 , 可以看到特斯拉先是停车避让 , 在观察到对向来车停车避让时迅速做出反应 , 快速通过 。 这样的场景在不同时期 , 不同国家和地区 , 根据驾驶员的不同习惯会有多种不同的结果 , 因此这类场景也需要在不同市场、不断的采集大量数据对神经网络进行训练 。
第三个场景被称为“停车场困局” , 相较外部道路有道路线等约束 , 停车场存在的可能路径会变得更多 。 可以看到公开的视频中特斯拉几乎画出了全部的可以通行的位置 , 通过神经网络在其中找出最优的行进路线 。
其实这样的路径规划内核从视觉感知诞生之初就一直延续 , 上世纪六七十年代诞生的人类最早的视觉感知自动驾驶车辆——StanfordCart , 在1977年便实现了立体视觉感知 , 并在随后两年完成了在散落椅子等干扰物的空间中自行规划路径通过的壮举 。
只是随着半导体技术和人工智能技术的发展 , 如今的芯片算力与当年已不可同日而语 , 人工智能也从专家模式转变为基于卷积神经网络的深度学习算法 。 因此当年在规划的路径上一个个稀疏的点 , 如今已经变成了一个接一个的密集的点 。 就在近些年辅助驾驶刚刚兴起时 , 还有车辆在过弯时会走出不断“撞线”的折线 , 那便是稀疏的路径点和未能很好优化的算法导致的 。
其实在上述几点之前 , 自动驾驶最先需要完成的是对目标物体的识别 。 想要让人工智能系统认识形形色色的人、车 , 还有路标、车道线等等事物 , 需要的不是特别强大的高科技 , 而是海量的标注员通过人海战术对庞大的数据进行标注 , 将标注完成的数据“喂”给神经网络进行学习 。 不管是当下的自动驾驶还是高精度地图的绘制等 , 这都是不可或缺的一步 。
不过这种笨办法显然不是长久之计 , 在系统认识足够多的事物之后 , 可以让机器自动对海量的数据进行标注 , 将机器标注的数据“喂”给神经网络进行深度学习 , 这也就是“无监督学习算法”(Unsupervised Learning , 无需人工对训练数据集进行标注 , 系统可以自行根据样本间的统计规律对样本集进行分析) 。
当然 , 无监督训练几乎所有的人工智能公司都在应用 。 但是 , 无监督训练是在完成了海量数据标注和更多的数据搜集之后才能发挥出其威力 。 率先在量产高级自动辅助驾驶领域发力的特斯拉不论在标注还是数据搜集方面都有着绝对的优势地位 。 目前 , 特斯拉已经积累了100万个10秒左右的视频 , 并给60亿个物体贴上了深度、速度和加速度的标签 , 这些数据目前已经达到了惊人的1.5PB , 且每天都还在增加 。 在“AI DAY”上提到 , 特斯拉已经完成了横跨美国绝大多数道路的数据采集 , 这些道路数据和场景都可以通过无监督学习帮助特斯拉自动辅助驾驶算法进行训练升级 。
而如此海量的数据和对应的需求的惊人算力 , 就需要本次“AI DAY”上亮相的主角——“Dojo”超级计算机来完成了 。
“Dojo”与自动驾驶汽车本身需要的芯片并不相关 , 特斯拉车型上目前搭载的是其自研的FSD芯片 , FSD芯片能够完成车辆所需的感知、决策、规划等所需的算力 。 而“Dojo”是为最终推送给用户的算法的研发、训练服务的超级计算机 。
当然 , Dojo最早要等到明年才能投入使用 , 当下特斯拉数据中心使用的是由5760个Nvida A100 80GB的GPU , 组成了720个节点 , 总算力达到1.8EFLOPS(EFLOPS:每秒千万亿次浮点运算) , 有10PB的存储空间 , 读写速度为1.6TBps的超级计算机 。 但在数据量、训练强度不断增加的情况下 , 这台超级计算机已经越来越不能满足特斯拉的需求 。 而且需要海量的物理结构进行连接以实现通讯的超级计算机不仅耗费大量成本 , 且由于连接结构的带宽限制成为“木桶短板” , 导致整体效率较低 , 并且还有分散的庞大散热问题 。
在这样的背景下 , 特斯拉再次发挥其市场上没有就自己造的精神 , 自研了“Dojo” , 顺便打破了不知道多少世界纪录 , 特斯拉“被迫”的成为了人工智能巨头 。 好吧 , 又被马斯克装到了 。
“Dojo”超级计算机本身与消费者有着遥远的距离 , 不过我们抱着欣赏凡尔赛产品的心情来了解一下“Dojo”的技术细节吧:
据悉 , “Dojo”单个芯片算力为 362 TFLOPS , 25 个芯片为一组 , 组成一个训练模块 。 算力可以达到 9 PFLOPS , 接口带宽为 36 TB/s 。 这次特斯拉推出的机柜模型由 120 个训练模块组成 , 内置 3000 个 D1 芯片 , 超过 100 万个训练节点 , 算力将达到 1.1 EFLOPS , 是特斯拉现有超级计算机的一万倍 。 并且Dojo 支持无限连接 , 理论上性能无上限 。 根据公开的数据 , Dojo的演算力已经达到全球第五 , 仅次于第一的日本『富岳』、第二的美国Summit、第三的美国Sier , 以及第四的中国『神威太湖』 。
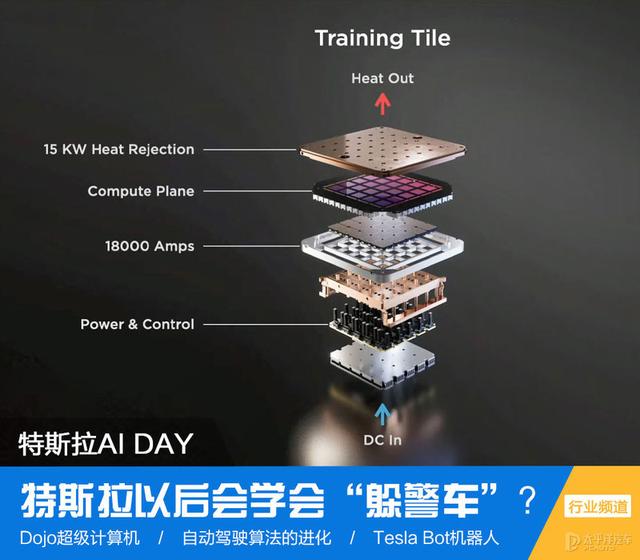
除了惊人的数据 , “Dojo”有趣的地方在于采用了非常规的封装形式 , 第一层和第五层铜质结构是水冷散热模块;第二层结构由5*5阵列共25个芯片组成;第三层为25个阵列核心的BGA封装基板;第四层和第七层只是物理承载结构附带一些导热属性;第六层是功率模块 , 以及上面竖着穿过散热与芯片进行高速通信的黑色长条状互联模块 。 而第二层5*5阵列的共25个芯片 , 采用InFo-SoW技术 , 有一整块300mm的晶圆制成 。 InFo-SoW不像传统模式将晶圆切割成多个芯片 , 而是所有的芯片都来自于同一个晶圆 , 不但不进行切割 , 反而是直接讲整个晶圆做成一个超大芯片 , 实现system on wafer的设计 。 也正是这样独特的封装形式 , 让Dojo解决了此前海量的物理结构成本高、通讯效率低、发热大等问题 。
“Dojo”的技术就聊这些 , 其实这里有一个问题 。 特斯拉自动驾驶算法的训练需要将来自全球超100万辆(截至目前)特斯拉车辆采集的真实数据汇聚于其在北美的数据中心 , 然后通过Dojo进行深度神经网络训练 , 以此帮助特斯拉的Autopilot不断进化 , 最终实现以纯视觉为基础的完全自动驾驶(FSD) 。
但是 , 特斯拉在国内关于数据安全的争议一直不断 , 涉及国家安全的关键区域禁止特斯拉进入的事件长期在网上发酵 。 对此 , 特斯拉曾表示 , “数据隐私安全 , 关乎着每一个消费者 。 特斯拉将严格遵守数据安全法 , 保护消费者数据相关权益” 。 同时表示 , 特斯拉已在中国建立数据中心 , 以实现数据存储本地化 , 并将陆续增加更多本地数据中心 。
在自动驾驶算法的训练中 , 尤其是针对本土市场驾驶员习惯的做出反应的算法训练需要用到Dojo或其他算力强大的超级计算机对数据进行处理并展开训练 。 也就是特斯拉不仅需要将数据存储在中国本土 , 还需要在中国建立有处理、训练能力的数据中心 , 未来特斯拉是否会将Dojo或其他超级计算机部署在中国本土 , 有待持续关注 。
“Dojo”超级计算机的用途是训练其自动驾驶神经网络 , 那具体有哪些工作?首先当然是通过“无监督学习算法”对新产生的海量数据进行自动标注 , 随着特斯拉新车销量持续快速增长 , 这类数据的增长也会以相应的速度飞速上升 。
其次是针对特殊场景的针对性训练 , 例如“AI DAY”上提到一起前方卡车卷起的风雪遮挡前方车辆的极端案例 。 这样的场景在现实中并不多见 , 但发生时会异常危险 , 因此 , 特斯拉会利用现有的超级计算机或未来的Dojo模拟更多的类似场景多神经网络进行训练 。
于是便有了包括前方车辆掉落粉尘等数十种不同的类似虚拟场景 , 而经过这种针对性训练之后 , 算法在类似场景中对目标物体位置的判断不再飘忽 , 而能够稳定的进行预测 。
插一句题外话 , 这张图是特斯拉数据中心为神经网络训练模拟的虚拟场景 , 不论是场景还原还是画面流畅度 , 甚至难以与真实场景进行区分 。 这实在让游戏玩家羡慕 , 脑补在这样的配置下玩GTA或者其他什么虚拟现实游戏 , 体验绝对拉满 。 在“AI DAY”上 , 特斯拉表示他们不止能虚拟麋鹿等罕见动物出没的场景 , 甚至虚拟一头独角兽出场也不在话下 。
如何找出类似的特殊场景?绝大部分会是特斯拉在Autopilot驾驶时 , 驾驶员突然介入 , 改为人工驾驶 , Dojo就会分析这个视频案例 , 试图找出驾驶员中断Autopilot的原因 。 又或者司机在高速路上突然刹车、堵车时有人插队、雷达与摄像头判断结果不一致、车辆发生事故/险些发生事故等等 , 将这些具体的案例 , 交给Dojo来分析处理 。
更多的数据通过Dojo的处理 , 反馈给神经学习系统 , 实现自动驾驶算法的迭代 , 而算法的迭代 , 让Autopilot更加好用 , 持续反馈更多的数据给Dojo分析 , 从而实现一个正循环 。 不过除了官方测试车辆 , 针对普通用户进行的数据搜集及可能涉及到的隐私、安全等问题是另一个层面值得讨论的方向 。
在“AI DAY”最后的问答环节 , 有人问特斯拉是否会开源其算法 。 马斯克表示这是一项耗资巨大的项目 , 特斯拉需要想办法摊平其成本 , 但目前为止还没有好的摊平成本的方式 。 面对巨额的成本 , 特斯拉不可能免费开源其算法等 , 但欢迎有意向的企业谈判购买 。
特斯拉拥有了Dojo , 那研发自动驾驶的车企是不是已经内卷到需要都搭建自己的超级计算机?其实并不是 , 利用虚拟场景对神经网络训练是业内常规的做法 。 而国内包括百度阿波罗、华为等都搭建了相应的云平台 , 中小企业可以利用这些大企业搭建的云计算能力进行数据标注、无监督学习、神经网络训练等 , 而且没有特斯拉那样庞大销量支撑的的数据搜集能力 , 多品牌合力共享的数据可以更好的完善潜在的场景 。
结语
【特斯拉|马斯克的凡尔赛:我们都用人模仿机器人了 你们还在用人模仿机器人】自研Dojo杀入全球超级计算机排行榜前列 , 特斯拉再次用惊人的行动力震惊了世界 。 而这样凡尔赛式的秀肌肉 , 确实也是特斯拉招揽全球一流人工智能人才最好的方式 。 最后丢出的Tesla Bot机器人引起了热议 , 不过Tesla Bot机器人更像是告诉全世界 , 特斯拉人工智能潜力的凡尔赛表演 。 即便Tesla Bot机器人还是真人“假装”的“PPT” , 但仿佛是对还陷在“人海”战术进行图像标注 , 用人堆砌人工智能的企业的嘲弄 。 Tesla Bot机器人是否能真的量产?目前给出结论还为时尚早 , 不过以马斯克一向激进 , Tesla Bot机器人能够解放人类生产力的大胆创意还是让人期待 。
- RedmiK50新机获得认证,双平台预装MIUI13
- 粉丝高价买的国行iPhone13Pro是扩容机!不保修、不保值、隐患大!
- 除了芯片,中国还有35项技术会被美国“卡脖子”,我们能突破吗?
- 余承东从不宣传高通处理器,只是简单一句话带过,或者是简单标注
- 终于理解为什么说两年前的“麒麟9000”是一块被严重低估的芯片了
- 想要清凉一夏?vivo S15美图来袭,“盛夏”配色尽显凉意
- 小米性价比高也容易踩坑?这2款不建议和2款值得买,可定要擦亮眼
- 毕业换机只看苹果?这些安卓旗舰也很香,实用小功能太给力
- 细思恐极!马斯克人形机器人即将问世,未来会影响到人类吗?
- 乱价最近让家电经销商彻底怒了!